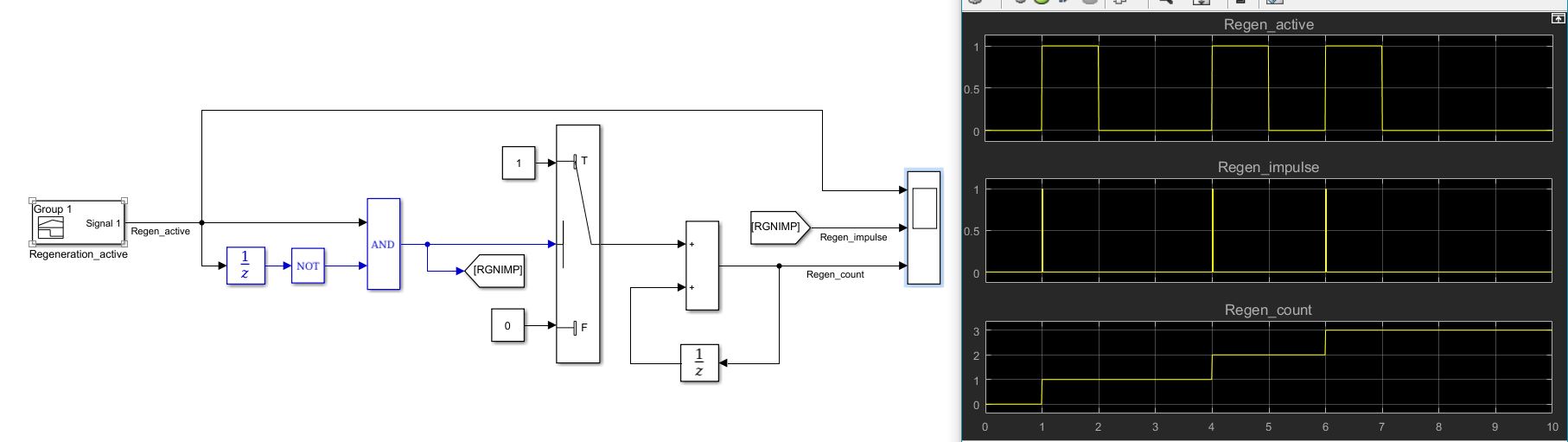
In my previous post, I've implemented a counter with hold and reset features. Although the block diagram isn't complicated, the implementation can be greatly simplified. Given that these are temporal functionalities, a state chart approach is much more suitable for the implementation
1) Objective:
Create a counter with an embedded hold functionality, as well as a reset. The reset takes priority over the hold (even if the hold is kept at a True state, the counter will be reset and start counting if the reset signal is True).
2) Model configuration:
Solver -> discrete, fixed simulation step. Step-size -> 0.01s. We will use MATLAB as the action language of our chart.
3) Principle of operation
We can distinguish 3 operations that our counter does, therefore there will be 3 associated states:
a) Incrementation -> this means that we will just add the value of a simulation step every time the computation reiterates.
b) Hold -> during this state, the counter will not increment. The beauty of state charts is that we can just implement an empty state, it is not mandatory to propagate a value through the computation chain at every step (something like adding 0).
c) Reset -> we just need to set the counter to 0. However, this is where it gets a bit tricky, as we might offset our counter by 1dt if we don't set the instructions right.
4) Solution
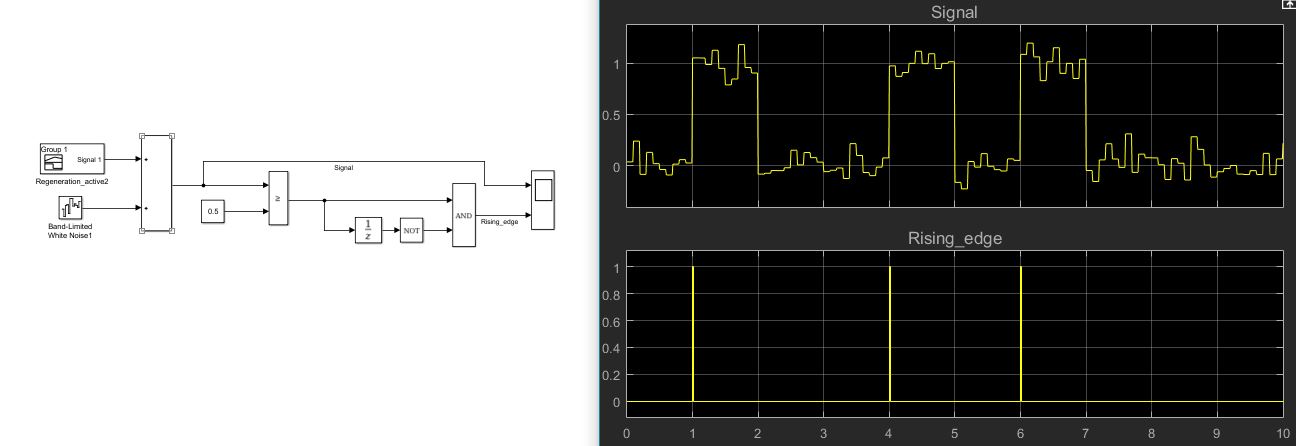
I would like to start with some notes: for this example, the input hold and reset signals are already processed outside the chart in order to get their rising edges. These impulses will trigger the transition from one state to another. We could just implement the rising edge detection inside the chart, in a parallel state. However, I've already covered how to get the rising edge here.
Let's look at the first attempt at the implementation. Note its simplicity, when compared to the block diagram approach.